
Display large image of Figure 1
Vol. 14. No. 1 January 2003
Joachim Hamberger
Technical University of Munich
Germany
The author is a Research Scientist in the Department of Forestry Work Science and Applied Information Technology.
ABSTRACT
A Differential Global Positioning System (DGPS) -supported working procedure was developed for the mulching of access corridors in age class I stands in Germany. In an empirical investigation, this DGPS navigation procedure was compared to the conventional stake orientation procedure. In addition, a work study was carried out for the two procedures, and the accuracy and economic characteristics of both were compared.
The relative proportions of individual work elements within the processes are similar. The productivity is the same. There are ergonomic differences for the driver with the two procedures. During the stake orientation procedure the driver has to twist around in his seat for orientation, during heavy vibration. With DGPS navigation the driver does not need to turn his head. With the stake orientation procedure there is a high risk of injury for the person setting the stakes. DGPS navigation is a one-man working procedure, so nobody has to work in the danger zone.
Stake orientation is characterised by very straight mulching lines. Deviation from the prescribed route increases with increasing distance from the starting point. Obstacles in the area complicate this stiff orientation procedure. DGPS navigation enables the driver to keep to the prescribed line and to adapt vehicle movements dynamically to the obstacles in the area.
The economic characteristics of the two procedures were compared using the cost comparison method. The DGPS navigation procedure was found to be better economically because the work was carried out by one man only.
Keywords: GPS, Mahler-Unifant, Broyeur-Forestier, Navigation, WaldNAV, brush cutting, row thinning, Germany, Fagus.
INTRODUCTION
Due to the big storm damage of recent years (1990 and 1999), large clearings have appeared, on which homogeneous and even-age stands are now growing. These areas often have a high proportion of undesirable wolf trees or encroaching soft deciduous trees. In order to investigate the dynamic of growth of these stands and to form clear working units (tending blocks), access corridors are necessary [2, 11]. However, it is how expensive to make tending paths on these areas by hand, and also ergonomically unfavourable for the forest worker.
The Hermeskeil Machine Base, Rheinland-Pfalz, Germany, creates these access corridors using a mulching machine [9, 10]. As the current working process has some ergonomic and economic disadvantages, a GPS-supported working process was developed in cooperation with the Technical University of Munich. In a study in January , 2000, the two processes were compared and studied with regard to output, costs, ergonomics and adherence to distance between the lines set out [6].
The aim of the project was to test newly developed navigation software and set up a working process using it. This Differential Global Positioning System process, referred to from now on as DGPS navigation, was to be compared with the working process used up to now, by which the driver orientates himself using marker stakes placed behind him (therefore called stake-orientation). The practicality and accuracy of the DGPS navigation were also to be established through tests on the area (see Figures 1 and 2).
METHODOLOGY
Process of Stake Orientation
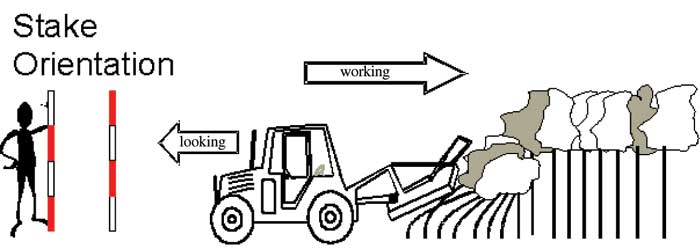
With the stake orientation process, an assistant sets stakes on the mulched corridor behind the machine. He indicates the starting points and the direction of the lines and sets the stakes for the orientation of the driver (Figure 1). The distances between the lines are measured by tape, the working direction is determined with compass and map. The driver has to orient himself by looking back during mulching in order to keep to as straight a line as possible (numerous turns of head are necessary). The assistant sets the stakes such a way in a line that the driver can permanently orient himself straightly by looking backwards. Therefore a correction of moving direction during the mulching process is not possible because a straight visible line is needed always.
Display large image of Figure 1
Figure 1. Stake orientation: two-man process, driver looking back for orientation.
Whilst obstacles have to be circumnavigated, the assistant has to come very close to the machine, in order to give the driver directions. While doing this, he is in the danger zone (mulched material flying around, vehicle moving backwards). Because the driver is anxious to keep a straight line free for looking back to the stakes, he also has to mulch trees with excessively thick trunks. For it he has to go backward and forward several times with the machine during mulching. This leads to a high wear on mechanical parts of the machine and to a heavy vibration stress for the driver.
The result of stake orientation are access corridors which are very straight lines.
PROCESS OF DGPS NAVIGATION
With this procedure a DGPS receiver and a computer are installed on the vehicle. The machine driver works alone (Figure 2). He orients himself using the display of the WaldNAV 1.0 program shown on the screen in Figure 3. He is shown the actual position of the machine as a cursor on the screen. The direction in which he works is defined by the forester who sets a compass course. The driver inputs this in the program and thus creates an ideal line starting from the actual position of the machine. The driver begins to mulch and orients himself using this line.

Display large image of Figure 2
Figure 2. DGPS navigation: one-man process, viewing forward and to the screen.
As there are many obstacles along the way, he cannot move exclusively along the computer's virtual route, but must recognise and circumnavigate real obstacles. The specifics of the ground have to be incorporated visually and integrated with the navigation on the screen. If the driver moves off the line to avoid an obstacle, for example, he sees his deviation graphically on the screen and the length of the deviation in metres. He can then take the shortest route around the object and return to the ideal line. Turning his head is not necessary for orientation.
TRIAL STANDS AND SCOPE OF TRIAL
The study was carried out in the middle of January in the forests administered by Morbach Forestry Office in the Hunsrück area of, Germany. The machine was observed in three comparable beech stands. All the stands were flat or only slightly sloping (<5%). In two stands work was undertaken using DGPS navigation, and in the third using the conventional method.
All three stands were fully stocked and had high density, 14-17 years old, around 6 m high, included a proportion of around one quarter soft deciduous trees and therefore needed tending. In the study, a total of 23 corridors were mulched, 19 by using DGPS navigation.
MACHINE DEPLOYED
As a carrier vehicle, the narrow wheel-base tractor Mahler-Unifant was deployed (Figure 4). To this Swiss product a chain mulching unit was connected (Broyeur Forestier) from the French company Quivogne (Figure 5). The mulcher is deployed in stands with stump diameters of up to maximum of 12 cm.
The mulching system has been in use since 1997 at the technical forestry base of the Hermeskeil Forestry Office. In 1000 productive machine working hours (PMH) with it, some 800 ha have been mulched. The usual distance between the corridors is 20 m, and occasionally, 10 m. Experience at the machine base has so far been generally positive, although the machine often has to be repaired because of the high mechanical demands placed on it.
Speed in this working process is to a very large extent defined by the automation of the machine and can only be influenced indirectly by the driver. The machine driver's experience is particularly important wherever obstacles have to be circumnavigated skilfully or ditches crossed.
DESCRIPTION OF THE NAVIGATION SYSTEM
The program WaldNAV was developed and used. It serves to navigate parallel lines in thickets. It was developed at the Department of Forestry Work Science and Applied Information Technology and optimised through cooperation with the Hermeskeil machine base.
The driver sees his position on the display as a cursor with a semi-circle and arrow (Figure 3). If the machine moves, the movement can be seen as a line of points on the screen which corresponds to the scale set. The screen picture rotates according to the direction of the movement. In this way orientation on the screen is always the same as that on the ground, and the need for complicated rethinking is avoided. An ideal line (target line) is generated by entering a compass bearing on which the driver can navigate.

Figure 3. Navigation along ideal line. Green line: ideal line, red crosses: real movement of the vehicle, semi-circle and arrow: actual position of vehicle, redd beams in clock-field: deviation of ideal line (=2.9 m).

Figure 4. Mahler-Unifant with Quivogne forest mulcher.

Figure 5. Quivogne forest mulcher.
Deviations from the ideal line are shown optically; if 5 m deviation is exceeded, there is also a warning tone. Positions are shown during movement, and once the end of the corridor has been reached, joined to a line which remains visible as a grey line on the screen. This makes orientation easier for subsequent corridors.
For navigation, a Panasonic Toughbook CF 71 was used with Windows95 as the operating system. This notebook is not susceptible to vibration (semi-ruggedized) and has a strongly illuminated 12.2 inch TFT screen. The screen is very suitable for working in direct sunlight. The Trimble AgGPS 132 was used, a 12-channel receiver with a horizontal positioning error better than 1 m. The Landstar correcting data signal came from a geo-stationary satellite in the south (elevation 45°). Electric current was assured using a connection to the battery of the Mahler-Unifant.
RESULTS
Working Time, Output
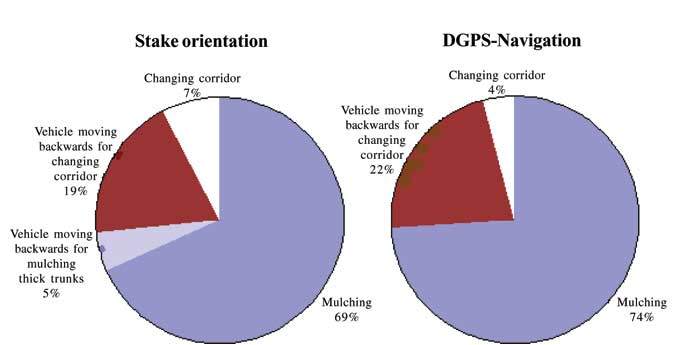
The working time and output of both processes are comparable. Output for both processes was around 370 m/h including moving back down the corridors, or 460 m/h not including moving back down the corridors. The proportions of individual work elements within the processes are also similar (Figure 6). Only the work element involving the machine going back on itself for mulching excessively thick trunks did not occur with the GPS navigation system. This work element was necessary with the staking process if excessively thick trunks were mulched, so that the line of view towards the back was kept.
Ergonomic Burden
During the mulching process, considerable whole body vibration occurs [4]. If the human body is subjected to this vibration over a longer period, it can lead to an recognized occupational illness [1, 12]. It is made worse by the constant turning of the head necessary for orientation in the stake-orientation mulching process. Sideways turning of the shoulders under a load is a particularly unfavourable (potentially damaging) posture. With DGPS navigation, the vibration of the vehicle is just as high as with the stake orientation process. The number of times the driver turns his head for orientation is however significantly lower (Table 1). Whilst 45 turns of the head were necessary to work along 100 m of the corridor for the stake orientation process, only 10% of these occured with DGPS navigation. This means that in the first case, a turn of the head was necessary every 2 m, and in the second case only every 20 m. Technically these turns of the head in the second case were not necessary, but due to habit.

Display large image of Figure 6
Figure 6. Proportion of pure working time taken up by the individual work elements during mulching using the stake orientation and DGPS navigation processes
If working correctly, the assistant in the stake-orientation process moves behind the machine, setting the stakes. This person is endangered by the machine itself (reversing by the driver in stands where visibility is poor), and by flying pieces of wood, stones, chain links, etc. With DGPS these dangers do not occur, as an assistant is not necessary. The personnel costs for the assistant do not arise either, although there are depreciation costs for the navigation system.
Investigation of Accuracy
A significant criterion for the practicality of the DGPS process is the parallelism of the corridors in the area and whether the distance between them is adhered to. Absolute parallelism is at least theoritically possible to achieve, as absolutely straight ideal lines may be created on the screen with WaldNAV. Because of irregularities occurring in the area, these can however only be partly adhered to.
Obstructions such as excessively thick trees, stumps and rocks have to be avoided. If an obstruction was avoided, the driver had to return to the ideal line. This required a relatively severe turn in the steering, and for getting back to the ideal line the driver had to steer back in the opposite direction. Because of the considerable length of the machine, quite a stretch of the corridor was required to re-adjust.
Mulching Using the Stake-Orientation Process
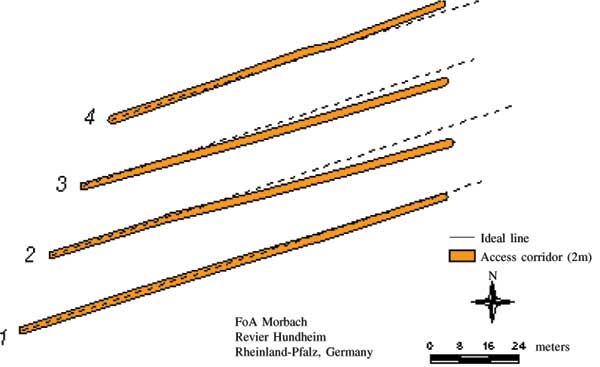
It is a characteristic of this process that it is possible to keep to the ideal line very well over long stretches, but also characteristic that if there are deviations they cannot be corrected. This means that once the mulching machine is on a track with a particular angle of deviation, this will be maintained strictly: the absolute deviation in metres from the ideal line increases with increasing distance from the starting point. This trend is clearly visible in corridors 2 and 3 in Figure 7. The only obstructions were over-large birches which were mulched with correspondingly greater effort in order to keep the line of visibility clear (This is expressed in Figure 6 "Vehicle moving backwards for mulching thick trunks"). The starting ends of the corridors were measured with a tape measure, but differed by up to 1.8 m because of displacement of the vehicle during the difficult alignment at the start.
Table 1. Number of necessary turns of head the driver needs to orientate himself.
Process |
Total Length of Access Corridor (m) |
Turns of Head, Total |
Meteres / Turn of Head |
Turns of Head / 100 meteres |
|
|
||||
| Stake orientation | 425 | 190 | 2 | 45 |
| DGPS navigation | 1343 | 65 | 21 | 5 |
|
|
||||

Display large image of Figure 7
Figure 7. Access corridors set out using the stake-orientation process. (ideal line: dashed line).
Mulching With DGPS Navigation
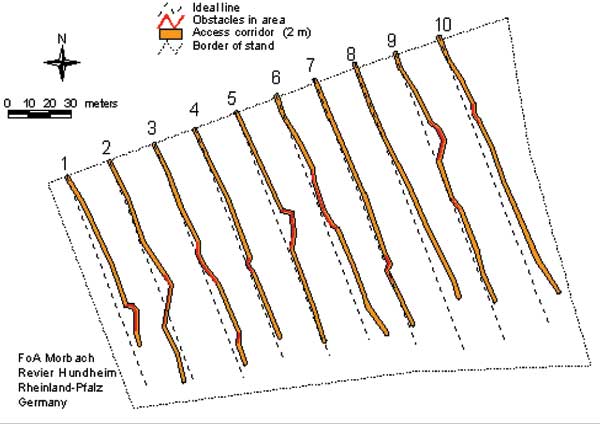
There were no significant problems with reception of GPS and correcting signal throughout the recording of data for the experiment. Ditches, over-large trees and stumps were the obstacles that occurred. The southern part of the stand was only sparsely stocked and so it was not mulched. The stock which was there in individual cases even avoided (corridors A6, A10). All corridors were set out as dead ends; mulching took place as the vehicle moved backwards down them (public road south of the stand). The corridor starting points were found using the WaldNAV program. Deviations of an average of 0.7 m occurred (maximum 2.6 m).
In Figure 8 the positions of the corridors in relation to each other and to the ideal lines were shown. The obstacles (red parts of line) were avoided, and then the vehicle returned to the ideal line. Visually the lines seem roughly parallel, especially if the obstructions are not taken into consideration. The actual corridors tend to lie slightly east of the ideal line.
Economic Characteristics of the Two Processes
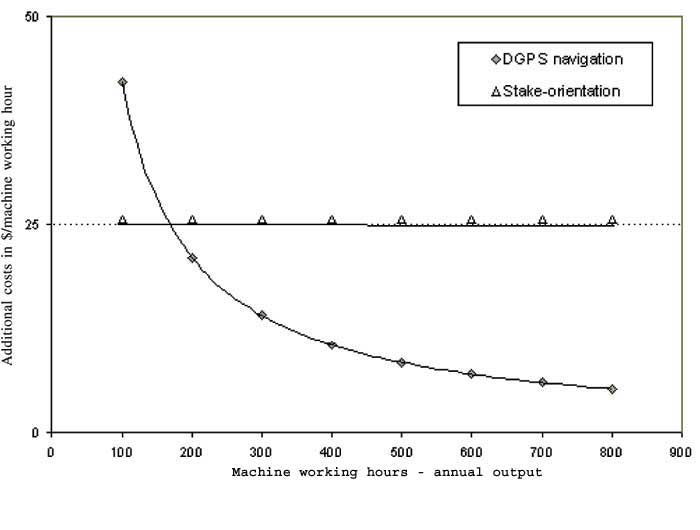
The two working processes can be judged equal in terms of output [8]. There is a difference in the structure of the costs. Basic costs per machine working hour are $100.00 for driver and machine and are not to be discussed here as they are the same for both processes. The differences lie in the additional personnel costs for the stake-orientation method and the cost of the navigating equipment for the DGPS process. These additional costs for the two processes were compared (Figure 9, Table 2).
For the calculation it is assumed that the GPS system is financed at a 7% interest rate. Given a depreciation period of four years, interest costs are $3,150.00. Maintenance costs as such do not arise, although the risk of a certain need for repairs must be reckoned with. This was calculated as 25% of the purchase costs. A remainder value for the investment was not estimated, as considerable material demands are placed on the equipment. If the system is used for 400 working hours per year, annual costs for DGPS navigation is $4,303.00. This corresponds to $10.80 per working hour. The annual costs of the stake-orientation process with the same output is $10,000.00 ($25.00/working hour). The threshold after which working with DGPS is cheaper than the stake orientation method is 172 machine working hours per year. Given an output of 0.9 ha/machine working hour, this corresponds to an annual output of 155 ha. Worked out another way, 688 machine working hours is the threshold after which costs for DGPS navigation are less than those for the stake-orientation method. At 400 machine working hours of annual output, this corresponds to a time period of 1.7 years.

Display large image of Figure 8
Figure 8. Access corridors set out using DGPS navigation, (ideal line: dashed line, obstacles avoided: dark).
Table 2. Cost calculation.
| Cost comparison calculation for the two processes | ||
| Investment in DGPS navigation | ||
| Vibration-resistant on-board computer with TFT screen and Windows NT | 6750$ | |
| GPS receiver incl. licence fees for differencial GPS | 3500$ | |
| Program | 1000$ | |
| Sum of purchases | 11250$ | |
| Rate of interest | 7% | |
| Interest payments (for 4 years) | 3150 $ | |
| Sum of investment costs | 14400 | |
| Depreciation period | 4 | |
| Total duration of use (productive machine hours— PMH) | 1600 | |
| Capacity utilisation threshold | 400 | |
| Annual utilisation (PMH) | 400 | |
| 400 | ||
| Investment in stake-orientation | ||
| None | ||
| Additional personnel costs of $25,6 / PMH | ||
| 400 | ||
| Derivation of costs | ||
| $/year | $/PMH | |
| Costs of DGPS-N (incl. interest and maintenance) | 4303 | 10.8 |
| Costs of stake-orientation (no interest) | 10000 | 25.0 |
| 400 | ||
| Economic viability of DGPS navigation in comparison with stake-orientation | ||
| Necessary minimum utilisation in PMH/year | 172 | |
| Necessary total utilisation (PMH) | 688 | |
| Investment costs repaid in 1st year (at 400 PMH/ year) | 58% | |
| Amortisation period in years (at 400 PMH/ year) | 1.7 | |
| Economic advantage of DGPS Navigation after 4 years | 22788$ | |

Display large image of Figure 9
Figure 9. The additional costs of the two processes in relation to annual output.
In the first year 58% of the investment costs pay for themselves. For the remaining 2.3 years, the economic advantage of the DGPS process compared with the stake orientation method can be calculated to be a total of $22,788.00. The costs in $/ machine working hour for the DGPS process are dependent on the annual output of the mulching machine. If the annual output rises, the additional costs per machine working hour decrease for the DGPS process (Figure 9). The calculation does not take into consideration the advantages of simplified logistics due to the fact that only one man is employed.
A Comparison of the Two Processes
A comparison of the two processes were combined in Table 3. Apart from the reliability of signal reception, all criteria can be compared with one another. The DGPS navigation system is superior in six areas - in three of these, significantly. The stake-orientation process is superior in two areas. The parallelism of the corridors is particularly good in the stake navigation process. However, the DGPS navigation has acceptable adherence to the distance between the lines and parallelism of the corridors.
Table 3. Evaluation of the two processes without weighting (+ positive, ++ very positive, +/- tolerable, - negative, — very negative).
| Criteria |
DGPS navigation |
Stake-orientation |
| Accuracy, parallelism | +/- | ++ |
| Ergonomics for the driver | ++ | — |
| Risk of accident to assistant | ++ | — |
| Avoiding obstacles (care of material) | + | - |
| Economic viability | ++ | — |
| Certainty of signal reception (DGPS) | +/- | |
| Low technical requirements | +/- | + |
| Organisation/logistics | + | +/- |
| Documentation | + | - |
CONCLUSION
Although the criteria presented in Table 3 were not weighted, it should be clear that the DGPS method of navigation provides substantial net benefits over the traditional stake navigation approach. It is particularly suitable for areas with many obstructions, such as former storm damage areas, as it is possible to get back to the ideal line. DGPS navigation is a promising technology as it combines ergonomic and economic advantages. Potential improvements in the reliability of signal reception can only build on these advantages.
However, it should be noted that at the moment, the accuracy of kinematic GPS in forests will not be better than 3 - 5m [3]. For this reason the DGPS process reaches its limit at a distance between the corridors of 20 m [5, 7]. That is sufficient for many machine navigation applications. In near future, the European GALILEO satellite system will complement the American GPS. GALILEO will be fully compatible with GPS. At that point, enough satellites will also be available for high precision navigation in dense forest stands.
PROSPECTS
The risk of storm damage to forest stands will increase in future, with the consequence that large clearings will emerge. For one thing there will therefore be no shortage of stands which are homogeneous in terms of age and structure and which must be made accessible by mulching machines. For another, however, these clearings must themselves be processed from access corridors. As on the one hand the orientation on such disaster areas is difficult, but on the other hand there is clear visibility of the sky for GPS-equipment (optimal signal reception), the navigation program can also be used on these areas.
AUTHOR CONTACT
Dr. Hamberger can be contacted by e-mail at -- jhamberg@edv1.boku.ac.at
LITERATURE CITED
[1] Becher, S. and S. Wehrmann-Kececioglu. 1999. Lexikon der Arbeitsmedizin. [Lexicon of labour medicine, First Edition]. Ecomed Publishers. Ecomed, Landsberg. 338 pp.
[2] Behrndt, W. 1999. Bestandeserschließung - Voraussetzung für ökologisch verträglichen Einsatz von Forsttechnik. [Opening up - conditions for environmentally compliant use of technology in forestry]. Forst und Holz 20(54): 642-646.
[3] Czaja, J.and J. Hamberger. 2001. Navigation und Einmessung mit DGPS im Wald. [Navigation and surveying with DGPS in the forest]. AFZ/Der Wald 25(56): 1327-1330.
[4] Eisenbarth, E. 2000. Mulchgeräte im Praxisvergleich. [Comparing mulching units in practice]. AFZ/Der Wald 10(55): 518-522.
[5] Engels, F. 2001. Anforderungen an ein GPS-Gerät beim Einsatz im forstlichen Versuchswesen. [Requests to a GPS receiver for applied forest research]. AFZ/Der Wald 10(56): 513-516.
[6] Hamberger, J. 2002. GPS als Mittel zum umweltschonenden Maschineneinsatz: Navigation von Forstmaschinen und Dokumentation ihrer Fahrbewegungen. [GPS as a tool for environmentally sound machine operations: navigation of forest vehicles and documentation their movements.] Publ. Forstliche Forschungsberichte München 188, 192 pp.
[7] Kettemann, R. 1995. GPS und seine Anwendungsmöglichkeiten im Forstwesen. [GPS applications in forestry]. AFZ/Der Wald 22(50): 1201-1203.
[8] Kobelt, H. and P. Schulte. [Eds]. 1999. Finanz- mathematik. [Mathematics of Finance]. 7. Publ. Neue Wirtschafts-Briefe, Herne/Berlin, 283 pp.
[9] KWF-Marktübersicht 1998. KWF-Marktübersicht Forstmulchgeräte. [Technical compendium of forest mulching units]. AFZ/Der Wald 5(53): 252-254.
[10] Mehlin, H. and R. Schöttle. 1992. Pflegepfade in naturverjüngten Laubholzdickungen. [Tending lines in hardwood thickets from natural regeneration]. AFZ 1(47): 42-44.
[11] Wilhelm, G.J., H.-A. Letter and W. Eder. 1999. Qualifizieren - Dimensionieren: Konzeption einer naturnahen Erzeugung von starkem Wertholz. Die Phase der Qualifizierung. [Increasing in quality and dimension: design for producing heavy timber in naturalistic silviculture]. AFZ/Der Wald 5(54): 234-237.
[12] Wörterbuch Arbeitssicherheit 2000. Wörterbuch Arbeitssicherheit und Gesundheitsschutz. [Dictionary of work safety and health protection]. 9th. Ed., Publ. Universum Verlagsanstalt, Wiesbaden, 869 pp.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}