
Display large image of Figure 1
{kind=link}
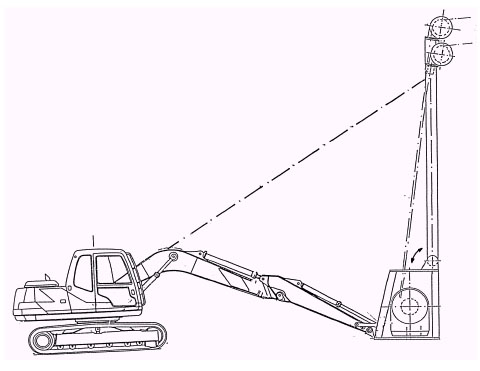
Figure 1. Boom-end mounted tower and winch [3].
Vol. 13 No. 1 January 2002
Halvor Torgersen
Torstein Lisland
Norwegian Forest Research Institute (Skogforsk)
Norway
ABSTRACT
The paper describes a study of an excavator-based yarder/processor in a Norwegian cable logging operation. The study investigated the excavator's potential as a combined base machine for both yarding, and processing of trees on the landing. A prototype was built and studied in operation, and the productivity of the system was measured in a time study. As a complete system consisting of two workers and one machine, the prototype produced 6.3 m3/productive work hour.
Keywords: cable logging, excavator, steep terrain, Norway, tree processing, Pinus sylvestris, Picea abies.
The authors are, respectively, Researcher and Chief Engineer at the Norwegian Forest Research Institute..
INTRODUCTION
Logging cost is highly dependent on the productive time of forest machinery and workers, and complex systems are more vulnerable to delays than systems consisting of fewer machines and workers. A common system in Norway is a medium-sized cable yarder in combination with an old harvester for processing at the landing, and a forwarder for transport to the roadside (4-5 workers). To find a cheaper and simpler system, a prototype of an excavator-based cable logging and processing machine was built at Skogforsk. The system consists of one worker in the field and one machine with an operator at the landing. The landing should preferably be at the roadside. The excavator was chosen as the base machine because of its ability to do other tasks, which makes it possible to utilise the machine to its full capacity. For example, the machine can be used for digging during low activity periods in the forest. In order to easily change the machine's position during work there should be no fixed guy lines. This makes it possible to use the machine to organise the processed timber along the roadside and to adjust the position of the lines during extraction operation.
MATERIALS AND METHODS
The goal of the project was to find a cheap and simple harvesting system for steep terrain. In order to build a combined machine like the one studied, it is important to know about necessary forces, speeds, stability, etc. Processors with feeder rollers have an oil requirement from 150 litres/min and upwards, while stroke delimbers require from 80 litres/min. High lead or running skyline extraction requires about 40 kN pulling force. In order to find a machine with oil capacity to serve both the winch as well as a stroke delimber it was necessary to use an excavator of minimum 14 tons. Weight is also important for machine stability and to avoid using guy lines.
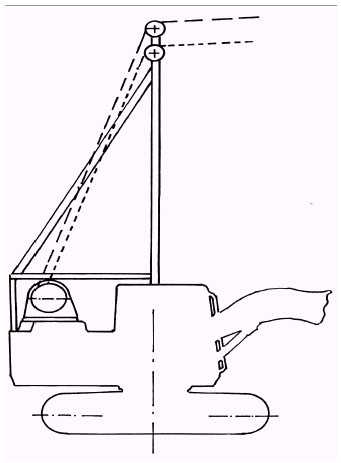
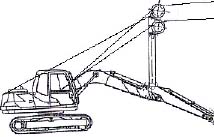
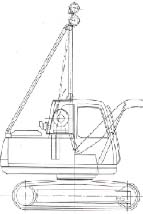
Before the machine was built, four solutions (Figures 1, 2, 3, and 4) were considered.
The solution in Figure 1 was rejected because the boom could not be used for processing and sorting. In this case an additional operation in the field or on the landing for processing timber would have been necessary.
The solution in Figure 2 was rejected due to poor service access on the excavator.
The solution in Figure 3 was rejected because it prevented free movement of the boom.
The solution in Figure 4 was chosen because it gives the machine the ability to rotate without moving the lines. Winch and tower are built into one unit, and the construction is fastened with four bolts. The unit can be removed in approximately 30 minutes if the excavator needs to be used for other purposes.
Display large image of Figure 1
Figure 1. Boom-end mounted tower and winch [3].

Display large image of Figure 2
Figure 2. Centre-mounted tower and back mounted winch.

Display large image of Figure 3
Figure 3. A short tower on top of the boom [2] and
front-mounted winch (beside the cabin).

Display large image of Figure 4
Figure 4. Centre-mounted winch and tower.
Construction work was done at Skogforsk. The machine carried an Igland 4000 double-drummed remote controlled winch, a tower, and a Tapio 400 stroke delimber. A 14-ton Kobelco SK120 excavator was chosen on the basis of machine weight and oil requirements (see Figures 5 and 6).
The yarder tower is affixed to the machine in its centre of rotation, which enables the machine to rotate 360° when processing trees without changing the tension in the lines. The stroke delimber was mounted on the excavator's standard implement coupling.
The winch was adjusted to release at a specific rope tension when the machine moved along the landing. Boom support on the ground provides stability when the excavator is extracting trees from the field. The skyline reached 150 meters in running skyline configuration. The carriage used was an Igland with steel clamps on the choker line to obtain slack-pulling ability.
The system was based on two-man operation. While the man in the field worked with choking or felling trees, the excavator operator could process and organise timber at the roadside. Both workers did the rigging work.
A time study was conducted in Vrådal, Telemark, in the middle of southern Norway. The system was tested over a period of two weeks, the first of which was a running-in period for the system and workers. The study is based on the production statistics from the following week.

Display large image of Figure 5
Figure 5. The prototype excavator with tower and
processor is able to rotate under the skyline when processing and sorting timber. The machine
can move in any direction to organise logs along
the roadside or to position the skyline.

Display large image of Figure 6
Figure 6. Stability was provided by boom support on
the ground. The machine had no stability problems during the extraction operation.
The trees were felled motor-manually in clear cutting and transported downhill as full trees. The excavator operator delimbed, cross cut, and sorted the logs at the roadside. In the meantime, the field man would fell trees, pull out the choker line, choke a load, walk to a safe position, or wait.
RESULTS AND DISCUSSION
The ground surface was smooth and firm. The logging method was clear-cutting. Table 1 describes the stand and the corridors.
Table 1. Stand, coridor and productivity data
| Corridor | 1 | 2 |
| Number of Turns | 49 | 27 |
| Average trees/turn | 1.3 | 1.3 |
| Total volume (m3) | 38.2 | 21.1 |
| Average volume/turn (m3) | 0.8 | 0.8 |
| Corridor length (m) | 120 | 110 |
| Corridor slope (%) | 55 | 50 |
| Average-tree volume (m3) | 0.6 | 0.6 |
| Average-tree diameter (cm) | 26 | 26 |
| Trees removed (st/ha) | 380 | 380 |
| Volume removed (m3/ha) | 230 | 230 |
| Tree species (%): Norway spruce/Scotch Pine/ Broadleaf |
68/ 27/5 |
76/ 23/1 |
| Productivity for the extraction operation (m3/productive hour) |
12.2 | 12.2 |
| Productivity for the processing and sorting system (m3/productive hour) |
9.9 | 11.5 |
| System Productivity (m3/productive hour, sorted at roadside) |
6.4 | 6.0 |
A study conducted in the UK [2] of an excavator-based combined harvester and cable yarder found a total cost of 15.8 US$/m3 at roadside. The system used in that study is similar in principle to the one illustrated in Figure 3. In the UK study, productivity for the extraction operation alone was 6.13 m3/productive hour. The volume per turn was 0.9 m3, the average tree size was 0.3 m3, and the tree species was Sitka spruce (Picea sitchensis). Difference in span length and tree size might explain the lower extraction productivity. The data for the Norwegian yarder is too limited to calculate an accurate cost for the logging. However, Skogforsk hired the excavator with the stroke delimber and its operator for 345 US$/day and the choker setter for 121 US$/day. If the day consists of 6.8 productive hours per day equal to [2], the price was 11.1 US$/m3 sorted at roadside for this special case. The costs of the winch and the steel tower were covered by Skogforsk, and are not included in this price.
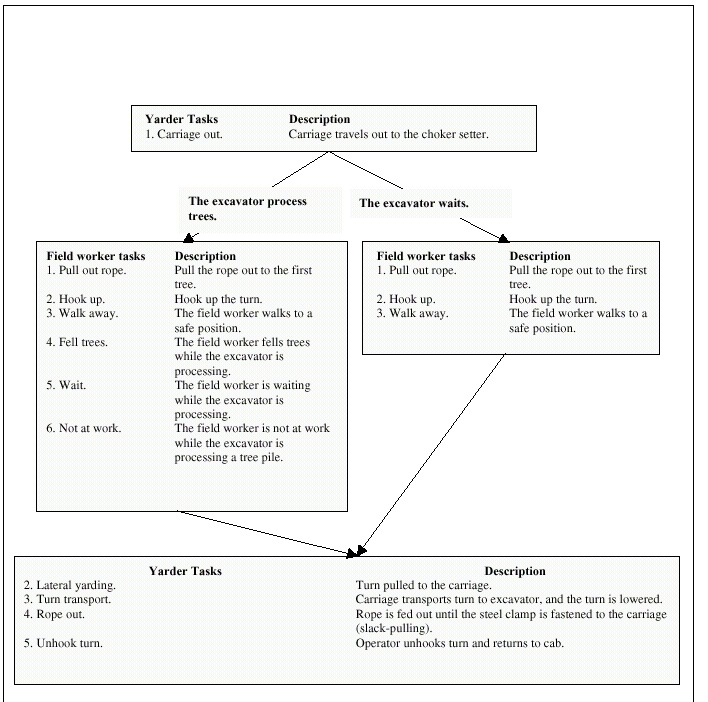
Figure 7 describes the co-operation between the operator with the excavator and the field worker with the chain saw. The model provides two paths. After the carriage has travelled out in the field (yarder task 1), the operator chooses either processing at the landing (path to the left), or the excavator waits for another turn (path to the right). This decision is mostly decided by the size of the tree pile in the front of the machine. If it is too big, the unhooking of the turn (yarder task 5) becomes more difficult. The left side of the model describes the field worker's tasks when the excavator is processing. The field worker's task 5 (waiting) is unproductive time and should be minimised. The operator may avoid this unproductive time by adjusting the work at the landing, for example by combining branch cleaning and sorting work with the field worker's task 6 (the field worker is not at work).

Display large image of Figure 7
Figure 7. System task model.
The right side of the model describes the field worker's tasks when the excavator is waiting for another turn. The lower part of the model shows yarder tasks where the boom is occupied with maintaining the stability of the machine.
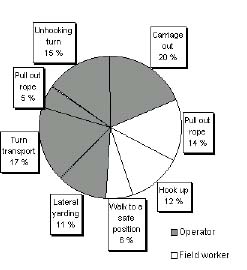
The ratio between the excavator's extracting and processing work was 41% extracting and 59% processing (productive time).
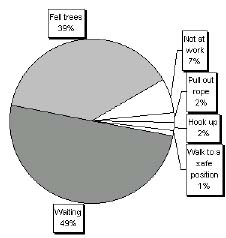
The choker setter waited 49% (Figure 8) of the time while the excavator was processing trees at the landing. In this case, this is too much rest and waiting time. The production of the system was limited by the excavator's capacity. The excavator was busy all the time, except when waiting for the choker setter to pull out rope, hook up and walk to a safe position (right side of figure 7). The choking time alone was too short for the excavator to lift up the boom and start processing. The ideal situation would be for this waiting time plus the carriage return time to be used for work at the landing. However, there might be some safety problems implied with utilizing this time. The field worker is "not at work" 7% of the excavators processing time in Figure 8. This is mostly when the excavator is processing a pile, cleaning and sorting at the end of the day.

Display large image of Figure 8
Figure 8. Field worker tasks while the excavator
is processing (productive time). The figure describes the field worker tasks in the box on
the left side in the task model (Figure 7).
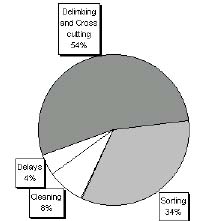
When developing new equipment or methods there will be high and unrepresentative delay times. The winch has to be adjusted, details must be improved, and so on. The cable yarder equipment did not influence the processing time for the excavator. Therefore, only the excavator processing tasks (Figure 9) are presented with delay times included.
Operations at the landing should have been faster to keep up with the field worker. Delimbing and cross cutting took 54% of the excavator's processing time (Figure 9). Processing with a stroke delimber is slower than a feeder roller processor, and a faster processor can increase the production. However, it needs larger hydraulic capacity. The sorting took 34% of the total processing time (Figure 9). A processor with better grip capability might perform this operation faster.
There were technical problems with overheating of the mechanical brakes on the winch [4]. Another drum set with better brakes and more precise controls may increase the extraction productivity and reduce re-choking of the load. The Igland winch was controlled with an electrical remote control. Integration with the two hydraulic circuits for the tracks, so the travel pedals control the speeds and directions of the drums [1], might enable more precise winching.

Display large image of Figure 9
Figure 9. Excavator tasks when the excavator is
processing on the landing (total time). The figure
describes the excavator tasks while the field worker is doing the tasks in the box on the
left side in the task model (Figure 7).

Display large image of Figure 10
Figure 10. Excavator and field worker tasks when
excavator is extracting (Productive time). The
figure describes the task combination of the
operator at the landing and the worker in the terrain
(the right-hand path in the task model, Figure 7).
CONCLUSIONS
The system with only one machine and two workers produced to our satisfaction. The relatively slow excavator can be improved to increase the system productivity. This can be solved with a faster and more suitable processor for this kind of work and a more precise winch. Automatic return of the carriage can also decrease the waiting time for the field worker. Another option is to do some manual delimbing in the field to keep the field worker more productive and help reduce excavator-processing time.
AUTHOR CONTACT
Dr. Torgensen can be reached by e-mail at: Halvor.Torgensen@skogforsk.no
REFERENCES
[1] Hartsough, B. 2001. Excavators in forestry - A View from the Wild West. In: Proc., Excavators and backhoe loaders as base machines in forest operations. Research note No. 11, Swed. Univ. of Ag. Sci., Dept. of For. Man. and Prod. Uppsala. 145-155.
[2] Hudson R.J. and J.B. Hudson. 2001. Reliability and harvesting productivity when using excavators as base machine in forest operations. In: Proc., Excavators and backhoe loaders as base machines in forest operations. Research note No 11, wed. Univ. of Ag. Sci., Dept. of For. Man. and Prod. Uppsala. 157-170.
[3] Lisland T. and N. Kyllo. 1993. A study of the Valentini cable crane arrangement in Germany. Norwegian forest Research Institute. 1430 Ås, Norway.
[4] Nitteberg, M. 2001. Excavator Based Cable Logging and Processing System. In: Proc., Excavators and backhoe loaders as base machines in forest operations. Research Note No. 11, Swed. Univ. of Ag. Sci., Dept. of For. Man. and Prod. Uppsala. 49-50.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}