Vol. 13 No. 2 July 2002
Sten Gellerstedt
Swedish Institute for Agricultural
and Environmental Engineering
Sweden
The author is an Assistant Professor at the Swedish Institute for Agricultural and Environmental Engineering.
ABSTRACT
This article describes the interface between a one-grip harvester and its operator as it relates to motor-sensory and cognitive activities of the operator when carrying out thinning and regeneration harvesting in Sweden. Work tasks are described, as are operator data gathering, cognitive and motor-sensory processes. Descriptions of motor- sensory inputs and control manipulation are based on digital data gathering from machine controls combined with parallel, multi-camera video taping of work activities. Work element descriptions, data gathering and cognitive processes were inferred based on interviews with 20 operators and operator instructors.
Work features found to limit an operator's efficiency were: few breaks in the work; very intensive handling of controls ( 4000 control inputs per hour in our study) due to lack of automatic functions in the boom and harvester head; restricted view from the cab; lack of information about the stand and log; and skewed and twisted work postures.
The main part of the operator's cognitive work was found to be done through automated skills. The experienced operator acts upon the global situation and seldom analyses it explicitly. Their chunks of information (memory aggregates recognized in toto) guide them in what to do, and usually they see only one course of action to follow in a particular situation.
Key future technical development needs and opportunities include additional automation to reduce operator control inputs, developing means of improving visibility such as 3-D laser scanning and additional use of stand inventory and historical data about log properties to improve automation of cross-cutting.
One of the key future research areas regarding training and robotization is to determine the data contained in the `chunks' of information used by operators in making machine location, harvesting and processing decisions.
Keywords: Forest machine, information ergonomics, automation, cognitive skill, thinning, cross-cutting, one-grip, harvester, operator skill, control movement, Sweden. Picea, Betula.
INTRODUCTION
To design a successful man/machine system, both the technical and the human components must be understood. Predicting the performance of a machine component is relatively straightforward compared to modeling human behavior. The latter becomes particularly important in off-road machinery, where site conditions are highly variable, giving the operator a major influence on the machine's performance.
This article explores the operator/machine/environment interface in one-grip harvesters engaged in thinning and regeneration harvesting. This will help machine designers by identifying key technological development needs. It will also help machine operator instructors understand and explain operator work tasks better.
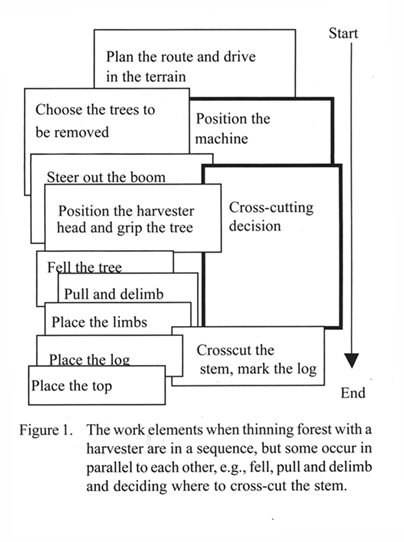
A Complex Work Task
The operation of a one-grip harvester is an intensive and complex work task, involving a uniform cyclic repetition of consecutive work elements. Some functions in the harvester are operated in parallel and in overlapping sequences (Figure 1). The job is also lonely. The operator sits in a cab in a fixed working posture, and is attentive and active with the controls during the whole work shift. Nordic studies [1, 4 , 8] report that 40 – 50% of the machine operators in mechanized logging suffer from ache or pain in the neck/shoulder region. Sub-processes of the transmission, the boom and the harvester head can be set to different levels of automation. Most of the effect of this automation can be perceived directly by the operator or seen indirectly on a screen. However, current harvester technology still necessitates so many machine control inputs by the operator that it may distract the him/her from cognitive activities such as choosing the tree to be removed in thinning.
Swedish harvesters worked 2500-2700 hours in 1998 [5] , an increase of 500 hours since 1988. Thus shift and night work has increased. The machine's improved work capacity, together with new directives on the environment and log specifications, has placed greater demands on the operator's attention. Furthermore, the work task has been enlarged, including more planning, maintenance, follow-up, customer contacts and reporting. Operators need to do a lot of assessing under time pressure, in parallel with the intensive handling of machine controls. Perceptual-motor skill is still an essential part of the performance, but the importance of performing cognitive skills has grown.
Harvesters have become more reliable and useful. The most important innovation on the harvester during the 1990s was the computerized systems for controlling, adjusting and monitoring power transmission and the hydraulic systems. The boom has also become easier to handle (e.g., the ground parallel function) with adjustable acceleration and retardation functions and with accumulators cushioning impacts. Self-leveling cabs are highly appreciated by the operators, as well as cabs and seats giving a comfortable working posture. The 1990s were also a break-through for cabs with lower noise and vibration as well as better visibility. Automatic tree-processing functions were also introduced, with log-making decision support. Geographical information systems facilitating ordering, reporting and wireless telecommunication are under strong development, as well as harvester mensurationof wood value.
Although little is known about how the operator's cognitive capacity is spent during work, previous research [6] had four major findings in this area. Firstly, the harvester was operated with low conscious awareness, as long as unexpected deviations did not occur. The operator followed the handling of the trees with his eyes and operated the controls during 90% of the time spent in the cab. Secondly, machine functions were controlled as over-trained procedures, triggered by signals captured by the operator from the surroundings. The boom was perceived by the operator as an extension of the body because of the closed time-space control loop through the sensory-motor system (see also [2] ). Third, operators had very low heart rate variability, meaning that they worked with a high mental work load. They could, however, recall the radio news and also explain what they were doing, without stopping work. This implies that the operators were not mentally over-loaded. Finally, although harvesting is uniform cyclic repetitive work, the operators did not become bored. Towards the end of the second 3-hour work shift of the day, the time doing the work element boom out was found to increase, probably due to lowered vigilance.
While these findings are helpful, they do not provide the detail required to improve machine designs nor to help train operators. As a result, the present study was initiated to help provide these more detailed descriptions.
Specific Objectives of the Study
The design of the study is based on the concept that effective operational control requires [3] : clear goals, sufficient information, a means to steer the process and a realistic understanding of the process itself. We assume in this study that the overall goals (e.g., harvest wood according a specification) are implicit and understood. The specific objectives of this study on operators in thinning and regeneration harvesting in Swedish forest conditions (which involves cross-cutting) are to:
To meet these objectives, one quantitative and one qualitative study were undertaken.
METHOD
The Quantitative Study
The first study included analysis of a Timberjack 870 with the 3000-model control system with one operator with more than 15 years experience. The first step was a time and motion study that noted the numbers of felled trees and logs made, and the work elements driving ahead, reverse, boom out, felling & processing, miscellaneous and interruption (see Table 1).
Table 1. Summary of worked time, output and portion of worked time activating controls during four periods of 30 minutes studied when thinning forest with Timberjack 870.
| Work-shift | 1 | 2 | 3 | 4 |
| Worked time [minutes] | 29 | 30 | 29 | 30 |
|
Number of felled trees |
38 | 43 | 46 | 50 |
| Share in % of worked time when handling the controls |
87 | 88 | - | 87 |
Table 2 describes the four sets of observations with the Timberjack 870 when the operator did a late thinning (1650 stems of 85% Picea abies, 15% Betula pubescens down to 800 stems/ha, 12.5 cm mean DBH of the removed trees). The study was done in early autumn, the visibility in the uneven stand was quite good and mainly pulpwood was produced. The operator was interviewed during the study.
In addition to a time-study, all manually activated control functions were measured during four runs, each of 30 minutes with the Timberjack 870. The voltage from the boom levers was sampled with 5 Hz into a data collector and later transformed to a video signal. The digital functions on the armrest panels were directly transferred to a video signal and recorded. The operator's hands were video-recorded via a mini-camera mounted in the cab ceiling. The whole machine was video-recorded from the ground. The four video signals were synchronized, shown on four screens and analyzed manually.
The Qualitative Study
The second phase of the project was to perform a qualitative study of work elements involved in operating a one-grip harvester in thinning, regeneration cuts, and while cross-cutting. Fifteen forest harvester operators performing thinning were observed early in the project through a time-study and interviewed regarding the work process. Structured interviews were carried out in the rest-hut during their breaks and conversations were carried on with some of them in the cab during work. In addition to the Timberjack 870 described above, a Valmet 921 harvester (equipped with a telescoping boom) working in regeneration cuts was studied. For the Valmet 921, the CAN-bus traffic was recorded into a laptop with custom-built software, and the two operators were interviewed. The detailed data from that experiment are confidential and therefore only qualitative findings will be presented here. Additional data were collected on operator cross-cutting and use of the machine's visual display by two Timberjack 1270B operators. One of the operators was interviewed in the cab during work in parallel with video recordings of the display, the operator's head and the boom tip. Both operators were interviewed on tape in the rest-hut. In this case also, only general qualitative findings are reported.
A description of the harvester operator's work is given below, mainly in thinning but also covering handling of saw timber in regeneration felling. The description summarizes the interviews with 20 operators. Information regarding skills, training and learning times were collected from discussion with machine instructors, forestry vocational school teachers and trade union representatives.The methods used to sort the work element and label the human information process were a combination of CPM-GOMS [12] and walk-through [10] .
RESULTS
The Quantitative Study
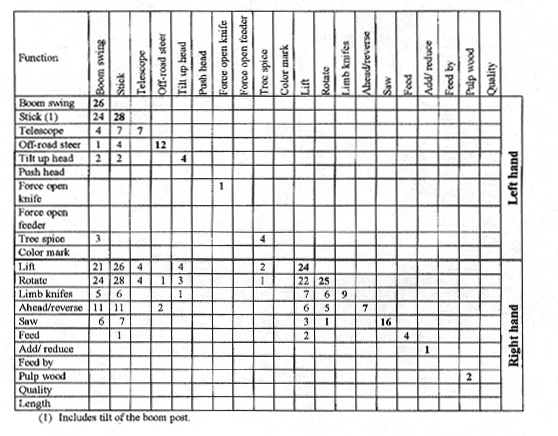
The quantitative results of the Timberjack 870 time-study shows frequencies and duration of control inputs made by the one-grip harvester operator performing thinning. Table 2 lists the number of observations, mean duration and percent of worked time for the work elements. Table 3 and Figure 2 show frequency and duration of the work with functions of the different levers separated by left and right hands. Table 3 shows, for example, that Drive reverse inputs are about as frequent as Drive ahead, but of shorter duration. Table 4 also includes functions controlled by push buttons and shows functions used in parallel when harvesting four trees with the Timberjack 870. It can be seen in Table 4 that the actions lift and rotate are done in parallel 22 times. Rotate was activated in parallel with stick 25 times, but the stick was at three occasions activated two times during the same rotate activation (giving in total 25 activations).
Table 2. Number of observations, mean duration and percent of worked time for work elements when thinning with a Timberjack 870.
| Work element | Number of observations |
Mean duration of the work element[sec] |
The element's share of worked time in % |
|||||||||
| Work-shift | 1 | 2 | 3 | 4 | 1 | 2 | 3 | 4 | 1 | 2 | 3 | 4 |
| Boom out to the tree | 39 | 44 | 46 | 50 | 10.8 | 9.0 | 9.6 | 10.2 | 25 | 23 | 25 | 30 |
| Fell and process | 38 | 43 | 46 | 50 | 21.6 | 20.4 | 20.4 | 18.6 | 49 | 51 | 53 | 47 |
| Driving ahead | 17 | 26 | 22 | 15 | 22.2 | 12.6 | 15.0 | 13.2 | 23 | 18 | 19 | 15 |
| Driving reverse | 5 | 5 | 6 | 1 | 7.2 | 6.0 | 7.2 | 9.6 | 2 | 2 | 3 | 1 |
| Interruption | 1 | 6 | 0 | 7 | ||||||||
Table 3. The operator's use of the boom levers and the ahead/reverse function in Timberjack 870 when thinning. Functions above the double line are by the left hand, below, in the right hand.

Display large image of Table 3
Table 4. Number of parallel function-activations when harvesting four trees with the Timberjack 870. Full automation (level 4) was used for feeding and manual (level 1) for the saw. Functions above the double line are by the left hand, below by the right hand.

Display large image of Figure 2
THE QUALITATIVE STUDY
The overall task of the work in the one-grip harvester is broken down into individual elements according to Figure 1. Within each work element, the work task and its goal are described, together with operation of the machine, necessary data and their properties, the sensory channel and mental process, as well as operator aptitudes, estimated learning time to get full efficiency and, finally, potential problems to obtain full efficiency. The operator's specific work instructions (i.e., the silvicultural prescription guidelines) are not reported on.
Plan the route and drive in the terrain
The operator's task is to choose the path to a place from which the machine can thin the stand, and drive along it without damaging the ground, the roots, the trees or the machine.
The operator adjusts a combination of speed, traction force and balance and chooses between high and low gear. In low gear and at working mode, it is possible to move at constant r.p.m. using manual or automatic speed control. The ratio between traction force (pull) and speed is set to automatic in normal driving, and can be manually gear-reduced in two steps. The speed is operated by the foot accelerator pedal or the control lever. The working brake automatically activates and releases when the operator stops or starts the machine. The differential lock can also be activated manually. The off-road steering is placed in the hand levers. The machine can be balanced with the cab leveling featureand the boom.
Necessary data to navigate and to decide where to go are the appearance of the terrain and the machine's position in relation to trees and obstacles as well as to gaps in the stand. Pre-information about ecologically and culturally sensitive areas (streams, bird nests, paths, ruins, etc.) is appreciated.
Data (properties) are slow (machine speed up to 2 m/sec), often predictable, continuous, but with noticeable variation . The operator needs to see up to 30 m vertically and 25 m horizontally. Shape, texture and color of the ground and vegetation are used as signs of bearing capacity.
Sensory channel mainly concerns sight but also perception of the machine movements (proprioceptive feed-back). The mental process when operating the machine is an unconscious over-skilled perceptual motor process. The operator needs good vision and spatial capacity, and must be able to perceive size and capacity of the machine. Learning time for steering is one month. Speed and balance takes two years to reach full capacity.
Problems when driving in terrain are: skewed and twisted work postures, restricted view, jarring motions, extreme swing while sitting in a narrow cab, perpetually operating the controls and sitting in seats that are difficult to adjust to individual needs.
Position the machine
The task is to place and position the machine where it is able to reach, fell and process as many of the trees to be removed as possible, and to decide where to put the logs.
Necessary data are concentration and position of trees and obstacles within 1.5 times of the boom reach, tree species and size, gaps in the stand, crown density, appearance of the crown (in daylight) and terrain. The operator combines the above factors for each situation. However the operators indicated that while they were operating the machine they mainly look for the geometrical distribution of the stems and their diameter. Tree species are identified by their shape and texture. The sensory channel is sight.
Placing of the machine is an optimization based on years of experiences and is a cognitive skill coupled with spatial pictures. It takes several years to reach optimal positioning of the machine and the operator must have experienced different thinning-forms, linked with the reach and capacity of the machine.
It may be hard to see the whole thinning zone due to underbrush, limbs, leaves and snow. Measurements taken with a nod-meter (jointed aluminium levers with goniometers worn by the operator) and visibility diagram in unpublished studies mentioned earlier indicate that the view is also restricted by the crane post and somewhat by the side-stakes and the roof. It is also difficult to see the distance to the next machine trail, especially in spruce stands. The operator cannot see the tree crowns in darkness.
Choose the tree to be removed
The task is to choose the trees to be removed according to the silvicultural prescription, to find openings in the forest where the trees can be felled and processed and decide where to place logs as well the machine trail.
The operator looks around to grasp necessary information. In a fixed cab, the operator rotates and bends his/her head upwards, and twists and bends the upper torso, which is considerably less necessary in a swiveling cab. The trees in the machine trail will be cut first. The operator gives a quick look at the falling direction and resolutely cuts them. Already at this stage the operator is aware of which trees are to be felled in the zone close to the trail.
During thinning, the stand opens up and trees in the outer zone are seen. These trees are preferably felled into a gap and in a direction making delimbing and cross-cutting easier. The choice of which tree to cut is more difficult at longer distances from the machine. Finally some equivalent trees remain and a decision must be made as to which ones should be cut. When a decision is made the operator does not change it. The silviculture prescription (low-, crown-, uniform- or high-thinning) provides guidance. However, in the first thinning, 60 - 70% of the removed trees are obvious choices to cut because they are standing in the machine trail, are damaged, are of less important species or standing close to another tree.
Necessary data when choosing the tree to be removed are the density of stems and crowns, tree species, sign of root rot and damage, height, diameter, location of the tree, bend, placement and form of branches as well as the position of the machine towards trees, gaps and obstacles. The ground- bearing capacity, surface structure and slope are also of importance. These data are important, slow, complex and continual, and sometimes deficient. In many cases, during operation the operator could not tell the number of trees/ha left after thinning, but the results were consistent with the silviculture prescription when measured by the research team. The operator relies on visual information, probably the space between trees is the first pattern to recognize. Then the operator searches for additional information in a "top-down" context-driven manner [16] . The thinning is complete when the stem-distribution is satisfactory. The operator uses fast pattern recognition coupled with the capacity of the machine.
The operator needs silvicultural knowledge and experiences of different kinds of stands, thinning principles, seasons and weather conditions. On average, it takes five years to become fully skilled in thinning.
A problem is how to get information about the upper parts of the trees, and to know which trees are not profitable to take.
Steer out the boom
The boom controls are operated by arms, hands and fingers (Figure 2 and Table 3 show the type and frequency of motions required to control the harvester). A knuckle-boom is controlled by: left/right, main boom out/in, outer boom out/in, extension out/in and on some machines also crane post up/down. The telescope boom does not have the outer boom out/in, and, on a parallel boom, that func tion is partly automated. There are individually adjustable functions for accelerating and retarding the valve motion speed.
Necessary data are the position of the boom and harvester in relation to trees and obstacles, the balance of the machine and the deflection of the control levers (a distinct sensing of an X- and Y-axis slot is appreciated). Time to complete boom-out (from start of boom movement until saw starts) took, on average, 9.9 sec for the Timberjack 870 operator studied. The 15 operators studied earlier did boom-out somewhat faster, in 7 - 9 sec.
The operator does a fairly simple continuous visual tracking of the boom-tip, which can have a speed of about 2 m/sec. The operator senses the machine's movements by balance and also in the gluteal region (buttocks). When steering out the boom, the direction of the operator's head is facing the harvester head, with quick turns when planning (can have the harvester head out of sight for max. 2-3 seconds). Handling of levers follows an over-trained sensory-motor scheme that takes 2 - 3 months to learn.
The operator needs to correct the boom path due to flexing of the tires and the boom as well as to loose joints, compression of the hydraulic oil and/or inner leakage. An automatic boom-tip control should lessen the demands on the operator. Another problem is the fixed size of the controls, which do not correspond to the different hand sizes among operators. Other questions are; What is the optimal width for lever deflection? Should the lever, when regulating two functions at full speed, give the operator the sense of being in a distinct corner (rectangular) or should it be circular?
Positioning the harvester head and gripping the stem
The task is to attach the felling unit to the tree and to get the felling direction. The harvester head is operated with hands and fingers. Rotator and grapple control are placed in the right lever, and tilt up/down of the felling unit is usually placed as buttons operated by the left hand.
The operator parries sway in the harvester head (due to imbalance between felling unit, boom and machine) with the boom and sometimes by gripping around the tree. After gripping the tree he sometimes opens the clamp arms, rotates the unit to get the felling direction and grips again. Sometimes only the upper arms (knifes) grab the tree when the operator can't see if the unit is touching obstacles. If there are thick low branches or snow, the unit must be attached up the stem and pulled down with the feed rollers and the boom.
To find the tree's felling direction the operator looks for gaps in the stand, obstacles, tree size and lean, degree of low branches and root buttress as well as the positions of the harvester, the boom and its head.
Required data for positioning the harvester head and gripping the stem are static and rather simple, caught mainly by sight, but also by sensing the harvester head's movements. A problem is to see obstacles such as stones and to exactly fit in the harvester head when gripping the stem.
Fell the tree
The task is to fell the tree into a gap and in a way that facilitates transport and processing, and without damaging remaining trees and getting logging waste on top of piled logs. The felling direction is normally perpendicular to the machine trail.
The operator closes the clamp arms, pushes the tree a little with the boom (pre-strain), presses the saw-button, lifts a little with the boom to release the saw-bar and looks out for stones and other obstacles. When the tree starts to fall the harvester head automatically tilts down. There is a possibility to give the tree an extra push to fall it. The operator can hold the button "Tilt up", rotate, or lift the tree and fell it in another direction. The location of the grip on the stem influences the impact on the boom when the tree hits the ground.
Necessary data for felling the tree are to see the saw, the saw dust, the tree falling and obstacles within the tree length, hear the sound of the saw, sense a light bump when the tree is sawn through, and the stability of the machine. Data flow is very fast (falling tree), important, simple, but sometimes deficient. Felling involves the highest level of power during the work cycle and takes, on average 5 sec from start of sawing until hitting the ground for a 15 – 18 m tree.
Sensory channels are sight, hearing and the finger sensing the saw button. We observed that the operator during felling only blinked his eyes after the saw had started, when the tree started to fall and when hitting the ground. Here, the operator has the highest level of attention during the work cycle and performing a fast chain of motor procedures that is driven mostly by visual feed-back.
Among problems are broken bars and chains, and chain-shoot (metal parts thrown if the chain breaks) which may hit the operator.
Pull, delimb and place the limbs
The task is to delimb the trunk, place the limbs, measure the stem and transport the tree towards the log pile, as well as avoid damaging standing trees when feeding and measuring length and diameter of the stem.
Fall, pull and start to delimb are often done as one continuous work element. The feed rollers are activated as fast as possible, in automatic mode when the saw-bar is back. When possible, the falling force of the tree is utilized to facilitate delimbing.
To reduce the impact on the boom and the cab caused by the falling tree, the operator can fell the tree into another tree, press the head against the ground, pull the tree during the fall or, release it. The location of the grip on the stem when the tree hits the ground is of importance with respect to vibrations.
The operator continuously examines delimbing quality, and can reverse and delimb again if needed. In cases of more difficult limbs and when there are splits (or little forks), the operator accelerates the boom simultaneously with feeding the stem with the help of the rollers and giving throttle. Usually the engine senses the need of power and automatically adjusts fuel feed. If there is a severe bend (sweep), the operator pulses open the delimbing-knifes via a button.
When delimbing is difficult, the harvester head is set to pass the preferred mark for cross-cut and then automatically reverses to the calculated cross-cut. This gives the head acceleration before the next limb. Estimation of taper is also facilitated by this procedure.
Necessary data to pull, delimb and place the limbs are the position of the tree, the appearance of the stem, the angle, size and type of limbs, stem diameter, bark strength (weather dependent) and the machining done by the delimbing knifes and feed rollers, as well as the ground bearing capacity, surface structure, slope and the appearance of the roots. These data are complex, fairly fast (feeding 4 m/sec), and continuous. The operator needs to see the stem, the feed rollers and the delimbing knife, and sense the bumps when delimbing, sense the balance of the machine, find, with hand/fingers, the buttons for feeding forward/reverse, open/close knife, pulse open knife, and sense the foot accelerator pedal.
The operator is attentive during tree processing and he decides placement of limbs and logs by routine. Delimbing demands the most skilled handling of the boom when harvesting and its learning time is perhaps three years to become fully skilled.
Feed-roller slip is a problem, especially when starting to delimb thick branches. The delimbing is usually good, but tension may occur giving an indentation in the wood, and sawmills can complain about too much bark paring (e.g., for giving wrong diameter).
Cross cutting decision
The task is to decide where to cross-cut the stem to get the best yield, either in relation to a price list or a specific order. The on-board merchandising system has a matrix including log classes based on species, length, diameter, taper, quality grades and the corresponding assumed price. A specific order can override the price list.
Saw timber requires the operator to assess and enter quality grade. Before the tree is felled, the operator estimates the grade of the first two logs and where to do the first cross-cut. This is done by comparing the appearance of the stem with memorized stems. He looks at the trunk to detect quality features such as spike knots and height of a knot-free part. Once the tree is felled this will be harder to see.
During felling and delimbing, the operator tries to see if there is root rot or compression wood in the butt-end. Assessing the quality grade is done fairly well, if sufficient effort is invested. The operator more often follows the computed decision when working with spruce than with pine. Before entering the quality grade, the operator pushes one of the four species- buttons, if it is not the same species as the last tree.
The log-making can be done with different levels of automation and has an adjustable waiting time before cutting. Usually, when handling saw timber, the computer stops the harvester head at the suggested cut. When cutting pulpwood, the saw is activated automatically.
The harvester head measures the length by means of a wheel running along the stem (90% of all heads) or by means of the feed-rollers. The measurement is usually acceptable (80% within 5 cm, [11] ) and the operator trusts it and can adjust for slips. The diameter is taken by a cross measure with the delimbing knives. The operator has difficulties in deciding the right diameter class [11] , because it is hard to see. Here, the operator has to rely on the measurement made by the machine where 50% of the measured logs does not fullfill the acceptable ± 4 mm [14] , especially for logs with large diameter knots. When moving the boom during feeding, a wider diameter could be measured due to slack delimbing knifes. The machine operators found it easy to calibrate the log measurements, but there was a lack of motivation to go out and use the caliper.
During length and diameter measuring, the taper is calculated and a prediction is made for the whole trunk with help of trunk profiles. The computer gives a cross-cut suggestion using an audible signal and stops the harvester head at the cut-place (including trimming allowance). The visual display lights the cutting-window-symbol (on Timberjack 3000) and also shows the chosen and actual log length and diameter, species and quality grade. If the measurement is too uncertain, the head passes the preferred cutting place and measures the diameter ahead of it (maybe due to slow data processing). Then the head automatically reverses to a calculated cut.
In automatic mode in the Valmet 921, the operator holds the saw-button (dead man's handle) whereas in Timberjack he/she just waits until the stem is cut into logs. The operator can also accept the cutting place through pressing the saw-button or finding a new cutting place by pressing step up/down in modules or using the feed-roller buttons.
The operator needs information about tree species, diameter, taper, length and roundness of the tree, the limits of dry and green limbs, type of limbs, bend, root rot, shake, split and other damage as well as where and how the trees are growing. Data are often simple and acquired quite quickly, but the operator has difficulty in seeing knot-swelling, root rot, roundness, compression wood and some defects. The operator's use of screen information differs depending on the stand and its ownership as well as his/her own experiences and motivation. Display information used by the two Timberjack 1270B operators in regeneration felling, when deciding the log, was mainly the cross-cut signal , the cutting-window symbol, measured length, species and quality.
To reach acceptable capacity in log-making, the operator needs theoretical knowledge about log grades, fiber and wood and the final use of the wood, as well as being interested in and learning the skill of assessment, which takes several years.
Cross-cut, mark the log and spray when needed
The task is to cross-cut and mark log grades by marking the log-end with paint and spraying the stump for control of root rot when needed.
When cross-cutting, the stem is held in a position that avoids hitting the operator with thrown chain-parts in the event of a chain breakage. After a touch on the saw-button in semi-automatic mode, the stem is sawn through and the saw-bar is retracted. Log-grade marking and spraying against root rot is done automatically or operator controlled if necessary. The operator needs to see the cross-cut place, the saw bar and the sawdust spurt. The process is very fast and the operator fixes his eyes on the cross-cut.
When the tree is felled or cross-cut, splits sometimes occur, which reduces the value of sawn timber. Low capacity of the saw, blunt chains, forced bar feeding and sway in the trunk during cross-cutting are some of the causes of these splits. To reduce them, the operator can stabilize the log when cross-cutting, wait until the harvester head is not moving or lower the log when cut through. On some harvesters, the lowering is done automatically. However, some operators we interviewed consider this stressful because they needed to plan for this automatic lowering.
Place the log, limbs and the top
The operator places the logs by timber, pulp and species in a way facilitating easy forwarder loading. This can be done by an automatic rotation of the harvester head. There must be enough space for the forwarder and its boom and grapple to get a grip around as many logs as possible.
Trees in the outer zone are fed towards the machine and delimbed outside the log zone (where the logs are placed). If the limbs cover the machine trail or shelter the root-buttress, the tree is pulled and delimbed there and the logs are fed to, and placed on, the other side of the machine trail. If limbs and tops are planned to be for energy-wood, they are put in stacks. Data used in this work element are simple and fast when feeding the log, and static and rather complex regarding the terrain.
The operator needs to know the assortments and to see the gap where the the logs are to be placed (already decided when placing the machine) as well as the ground bearing capacity, surface structure and whether the roots needs protection. It is advantageous for reducing total costs if the harvester operator understands forwarding work.
Additional observations
The operators could not describe the location of the functions in the control levers (boom, rotator and limb knifes) when sitting in the cab, they had to demonstrate it. They could, however, describe the location of the different push buttons (saw, feeding, species, etc.). When walking back on machine trail with an operator, he could account in detail for situations that caused problems. He also seemed to remember a lot of common situations, but could not report on particular stumps. The machine instructors told us that the most skilled operators did the least number of lever controls per tree, and that differences in productivity between operators can be ± 20%.
DISCUSSION
The aim of this study is to explore the man/machine interface in single-grip harvesters. To meet that, we quantified the control inputs made by the harvester operator, and closely described each work element when harvesting trees. Here we will discuss modifications to harvester technology and future research to improve our understanding of harvester work.
Boom Automation
Among problems in harvester work are operator fatigue and pain in neck and shoulders. The operator reported on in Table 3 and 4 activated lever functions 4000 times per hour, during 88% of the worked time (50 times per tree and harvesting 80 trees per hour). Most frequently, functions activated were those related to boom movement, namely rotator, stick, boom-swing and lift, followed by the processing and driving functions saw, off-road steering and delimbing knives. Gellerstedt [6] reported that the intense operation of the harvester caused few pauses (emg-gaps) in the trapeze muscle. Healthy operators had 11 pauses per minute while operators with ache in neck or shoulders had only 6 pauses. Ergonomic guidelines [7] recommend that manufacturers build booms giving the operator at least a three second micro-pause per work-cycle. In reviewing important components of the work, we note that the work element boom-out took 25% of the time (Table 2). The boom-work includes many small boom-tip corrections, which can be seen in table 3 (e.g stick-out). Relieving the operator from correcting boom-tip location through automatic boom tip control would benefit operator health and productivity. Among the technological challenges are that automatic boom-tip controls needs an external verification of the tip position to be able to compensate for tire and boom flexing. This might be achieved combining inertial sensors with other sensors.
Processing and Deciding on Log Dimensions
During log-making, lack of information about the tree still is a problem. For example, diameter measurement needs improvements and the operators have problems seeing roundness and sweep. Filtering of the diameter signal from assumed knot butts and other rapid diameter changes is part of the solution. Another is to use data about the average trunk shape, knot size and tree height from similar stands. Some saw-millers urge that the operator's quality assessment should be replaced by this. With this approach, the operator would determine whether each tree deviates from mean stand values for properties such as the height of the live crown base, rather than individually assessing these properties for each tree.
Better length and diameter measurement can also be achieved by using ramp functions for accelerating the feed rollers [15] , coupled to stem diameter and weather condition. This will reduce the amount of slippage, give better delimbing quality and cause less bark peeling. Non-touch length and diameter measurement with line scanning camera technology is under development, and has shown promising results [13] . The Timberjack 870 machines studied were set to full automation for feeding and manual for activating of the saw. The reason for choosing manual saw was that the operator could not catch up wrong decisions made by the computer if set to full automation. With a more reliable processing and measuring of the tree, full automation for the saw can be chosen more often, and not only when cutting pulpwood. This will result in considerably fewer control inputs to be done by the operator. This may free up time for more careful looking around to plan for better log breakdown and upcoming work steps.
Facilitate Visibility
Almost all work elements when harvesting trees involve the visual gathering of information. Human sight is therefore probably a bottleneck if trying to speed up the process. The operators indicated, for example, that they have problems seeing defects in the log at current feeding speed of 4 m/s. As noted in the Results section, the operator also has difficulty in perceiving trees and obstacles in the outer operational zone when positioning the machine, and when choosing and felling trees. A swingable, self-leveling cab that is cushioned against vibration gives the operator better visibility and is more comfortable. The swing facility is best when separated from the boom-turn, such as for the Pendo cab and Timberjack 1470. This enables the operator to place the cab in a direction giving best visibility. These solutions also pass up some of the skewed and twisted work postures as well as the jarring motions and the extreme swing.
Swedish forestry is beginning to introduce harvester-GIS to help the operator identify the best route. However, there is also a need of 3D mapping support that facilitates navigation on a micro scale. The 3D map can facilitate the placing of the harvester so as to reach as many trees as possible. Automatic image and laser scanning, and a "fit in" function when attaching the harvester head to the stem may overcome some of the problems with the restricted view. Efficient use of such a decision aid, however, requires an interface facilitating understanding of thinning. It is also desirable to have a feed-back feature to estimate basal area before/after thinning, thus allowing for faster operator learning. The laser scanner, however, is still quite expensive and would need to be used for more tasks (e.g. boom control) to be profitable.
Automation
Many simple human motor-sensory and cognitive work elements in mechanized harvesting can be replaced by automation. Most of them are already processed automatically by the operator, as they are performed without focused attention (see section Steer out the boom). However, automation involves a risk of creating a boring job and reducing the operator's alertness. Decisions on opening up a stand in rough terrain and advanced parts of the boom operation probably contribute to the meaning and attractiveness of this particular job. So, simple motor-sensory functions can be fully automated, such as controlling the boom-tip and fitting the harvester head round the stem. Other work elements need automation chosen by the operator, such as targeting the tree to be cut. For more controlled processed cognitive tasks such as tree selection and placement of the machine, decision advice is better than automation.
To avoid accidents and wear on the equipment, it is worth considering that operators may reduce machine stability when trying to reduce work effort (e.g, processing the tree during its fall instead of when it reaches on the ground). This is particularly significant as there seem to be short periods during work when the studied operators were unresponsive [6] . The frequency of these unresponsive periods increased as the work proceeded. A high degree of automation combined with operator inattention could therefore lead to accidents.
The Cognitive Work
The main part of the studied harvester operator's cognitive work was probably done through an automated skill. On the video recordings is seen that the operator performed several parallel sub-tasks perfectly, with deficient data and also under time pressure. This is in accordance with previous findings by [9] . However, according to operators, it takes several years in mechanized thinning to efficiencly handle cognitive tasks such as placing the harvester in the best position to work an uneven stand. Table 3 shows a quite large amount of driving reverse, indicating that the operator in this case had problems in finding the optimal placing of the harvester. The operators learning time to get full efficiency is estimated by machine instructors and trade union representatives to be about five years. There is, however, a wide variation in productivity between different operators. The very skilled operator is seen by the instructors as a good observer of the whole system, with an ability to be relaxed and have a fast and reliable motor-sensory reaction.
The operators is not mentally overloaded, as they are able to answer questions during operation and also recall the radio news. Sight, however, seems to be a bottleneck in harvesting because of it's restricted ability to grasp the whole scene, and the high speed of the dataflow. The operators have a very effortless picture of the situation and usually they only see one course of action to follow. They act upon the situation and chunks of information in sequences guide them in what to do. This chunk is a very specific memory aggregate of stimuli recognized as a unit, and is a component of the cognitive skill . Parts of this chunking are described in the results chapter, for example the picture of the stem-distribution when selecting trees to be felled. Future research should define them in greater detail and how they are linked together in a way that facilitates operator training, for example through feed-back in a simulator or in the machine. Information about chunks will also help guide which data from a sensor to interpret when developing automation.
CONCLUDING REMARKS
As our quantitative study indicates, the man/machine interface in the one-grip harvester still requires very intensive handling of controls. It also shows that the boom and harvester head need to become easier to handle. Our qualitative study shows that the operator's work place is not yet fully efficient and requires better visibility, visual and orientation aids, as well as more "sensing" in the harvester head to provide faster operation.
Future forest machines with advanced information technology, automatic functions, long utilization time and enlarged work tasks, necessitate equipment that is enjoyable to work with. This would help alleviate the stress of a more demanding work environment for existing operators and also help with future recruitment of young people as operators.
To keep forestry profitable in the face of demands on biological diversity and wood quality, automation must support the operator's advantage in handling the complex parts incomponents of harvester work. Relieving the operator of many fast and simple work elements will enable better and faster planning and judgements on the forest and the logs. It will also free up time for new tasks such as supervisory control of partly autonomous machines, which now are under testing in Sweden.
ACKNOWLEDGMENTS
The Swedish Council for Work Life Research funded most of the study. Thanks are also due to Timberjack Sweden of Filipstad and Partek Forest (Valmet) of Umeå.
AUTHOR CONTACT
Mr. Gellerstedt can be reached by email at -- Sten.Gellerstedt@sh.slu.se
REFERENCES
[1] Axelsson, S-Å. and B. Pontén. 1990. New ergonomics problems in mechanized logging operations. Int. J. Ind. Ergonomics, 5, 267-273.
[2] Boff, K.R., L. Kaufman, and J.P. Thomas. (Eds). 1986. Handbook of perception and human performance. John Wiley and Sons. New York.
[3] Brehmer, B., 1989. Learning in and about dynamic work environments. CMD-report No. 3/89. Uppsala University, Sweden.
[4] Dale Ø., K.B. Hagenand and J. Stamm. 1993. Norwegian logging contractor's economy and work environment (in Norwegian). NISK, Norwegian Agriculture University, Ås, Norway. Skogforsk Report 93:25.
[5] Gellerstedt, S. and B. Dahlin. 1999. Cut-to-length in the next decade. J. For. Eng. 10(2): 17-25.
[6] Gellerstedt, S., 1993. Thinning with a forestry machine - the mental and physical work (in Swedish). Res. notes No. 244. Dept. of Operational Efficiency, Swedish Univ. of Ag. Sci.
[7] Gellerstedt, S., R. Almqvist, D. Myhrman, B.O. Wikström, M. Attebrant and J. Winkel. 1999. Ergonomic Guidelines for Forest Machines Handbook. SkogForsk, Uppsala, Sweden.
[8] Hänninen K., P. Leino, H. Rytkönen and R. Prättälä. 1992. Work and health in mechanised forestry:a questionnaire study about contractors and machine operators social, health and work situation (in Finnish). Publish in the Forest, Conststruction and Agriculture Workers Retirement Foundation Report LEL Työeläkekassan julkaisuja 21:1992.
[9] Hasher, L. and R.T. Zacks. 1979. Automatic and effortful processes in memory. J. Exp. Psych.Vol. 108: 356-388.
[10] Helander, M.G. and Ö. Skinnars. 2000. Use of cognitive walkthrough for evaluation of cockpit design. Proc. of the XIVth Triennial Congress of the Int. Ergonomic Assoc. and 44th Annual Meeting of the Human Factors and Ergonomic Society, July - 4 August, 2000. San Diego, California, USA. Human Factors and Ergonomic Society, Santa Monica, California.
[11] Helgesson, T., 1997. The occurrence of cross-cut clefs among saw timber done with harvesters (in Swedish). Trätek Rapport P 9712100. Stockholm, Sweden.
[12] John, B. E. and D.E. Kieras. 1996. Using GOMS for user interface design and evaluation: Which technique? ACM Transactions on Computer-Human Interaction. Vol. 3: 287-319.
[13] Löfgren, B. and L. Wilhelmsson. 1998. Beröringsfri diametermätning (Non-touch length diameter measurement). Resultat No. 13. SkogForsk. Uppsala, Sweden.
[14] Möller, J. and J. Sondell. 2000. Kundanpassning kräver bättre diametermätning - möjligheter i skogen (Customer demands better diameter measuring - possibilities in the forest). Resultat No. 15. SkogForsk, Sweden.
[15] Timperi, A., 1997. Modern Engineering in the Development of Hydraulics and Control Systems for Forest Machines. PhD Thesis. Publications 202. Tampere Univ. of Technology, Tampere, Finland.
[16] Wickens, C. D., 1984. Engineering psychlogy and human performance. Bell & Howell Company. Ohio, USA.
{kind=link}
{kind=link}